

 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
DCU功能是()
A.输入信号和输出信号的处理;
B.牵引和制动运行的控制和调节;
C.制动力的分配;
D.诊断和自检;
E.测量速度。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.输入信号和输出信号的处理;
B.牵引和制动运行的控制和调节;
C.制动力的分配;
D.诊断和自检;
E.测量速度。
答案
 更多“DCU功能是()A、输入信号和输出信号的处理;B、牵引和制动运行的控制和调节;C、制动力的分配;D、诊”相关的问题
更多“DCU功能是()A、输入信号和输出信号的处理;B、牵引和制动运行的控制和调节;C、制动力的分配;D、诊”相关的问题
第2题
A.监测并处理火警、过热、烟雾探测器的信号,将火警、过热和烟雾信号发送给数据集中装置(DCU)
B.监测火警、过热、烟雾探测系统的状态,将故障信号发送给数据集中装置(DCU),并根据探测系统的状态自动切换运行模式(单环路模式和双环路模式)
C.控制发动机,APU,货舱灭火瓶爆炸帽触发电路的连续性和灭火瓶温度补偿压力开关,将触发电路故障信号和灭火瓶低压信号发送给数据集中装置(DCU)
D.根据轮载信号自动切换APU灭火系统工作模式
第3题
A.监测并处理火警、过热、烟雾探测器的信号,将火警、过热和烟雾信号发送给数据集中装置(DCU)
B.监测火警、过热、烟雾探测系统的状态,将故障信号发送给数据集中装置(DCU),并根据探测系统的状态自动切换运行模式(单环路模式和双环路模式)
C.监测发动机、APU、货舱灭火瓶爆炸帽触发电路的连续性和灭火瓶温度补偿压力开关,将触发电路故障信号和灭火瓶低压信号发送给数据集中装置(DCU)
D.根据APU灭火手柄位置自动切换APU灭火系统工作模式
第4题
A.监测并处理火警、过热、烟雾探测器的信号,将火警、过热和烟雾信号发送给数据集中装置(DCU)
B.控制火警、过热、烟雾探测系统的状态,将故障信号发送给数据集中装置(DCU),并根据探测系统的状态自动切换运行模式(单环路模式和双环路模式)
C.监测发动机,APU,货舱灭火瓶爆炸帽触发电路的连续性和灭火瓶温度补偿压力开关,将触发电路故障信号和灭火瓶低压信号发送给数据集中装置(DCU)
D.根据轮载信号自动切换APU灭火系统工作模式
第5题
在选用RPS功能,以下说法正确的是()。
A.RPS_ON信号类型为输入信号
B.RPS_ON信号类型为输出信号
C.RPS_ST信号类型为输入信号
D.RPS_ST信号类型为输出信号
第7题
A.控制并处理火警、过热、烟雾探测器的信号,将火警、过热和烟雾信号发送给数据集中装置(DCU)
B.监测火警、过热、烟雾探测系统的状态,将故障信号发送给数据集中装置(DCU),并根据探测系统的状态自动切换运行模式(单环路模式和双环路模式)
C.监测发动机,APU,货舱灭火瓶爆炸帽触发电路的连续性和灭火瓶温度补偿压力开关,将触发电路故障信号和灭火瓶低压信号发送给数据集中装置(DCU)
D.根据轮载信号自动切换APU灭火系统工作模式
第9题
开启RPS功能后(见图),机器人运行到PGM_SELECT时,已输入RPS-XX信号,以下说法正确的是()。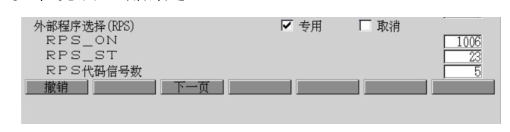
A.机器人会立刻输出信号28
B.机器人会立刻输出信号23
C.机器人需输入信号1006,才能进行跳转
D.机器人需输入信号1011,才能进行跳转



















